әВЗзЈ¬»ЖәЖЈ¬ХФәЈМОЈ¬МёУоәЖЈ¬Цмҙә
ЈЁДПҫ©УКөзҙуС§НЁРЕУлРЕПў№ӨіМС§ФәЈ¬ҪӯЛХ ДПҫ© 210003Ј©
0 ТэСФ
ОЮИЛ»ъЈЁUAV,Unmanned Aerial VehicleЈ©УЙУЪҫЯУРёЯ¶ИөДБй»оРФЈ¬ФЪ»хОпФЛКдЎўҝХЦРКУЖөБчЎўРйДвПЦКөТФј°ФцЗҝПЦКөөИБмУтөГөҪБЛ№г·әөДУҰУГЎЈНЁ№эҪ«ОЮИЛ»ъУлөШГж»щХҫЈЁGBS,Ground Base StationЈ©ҪшРРЙо¶ИХыәПЈ¬·дОСБ¬ҪУОЮИЛ»ъДЬ№»ёЯР§өШҪшРРЦЗДЬНшВзҝШЦЖәНКэҫЭҙҰАнЎЈҙЛНвЈ¬·дОСБ¬ҪУОЮИЛ»ъ»№ДЬ№»КөПЦГЬјҜөД·дОСНЁРЕёІёЗЈ¬ҙУ¶шВъЧгНЁРЕНшВз·юОсРиЗуЎЈКЧПИЈ¬¶ФУЪОЮИЛ»ъёЁЦъөД·дОСНЁРЕПөНіЈ¬ОЮИЛ»ъҝЙТФідөұЦРјМҪшРРНЁРЕБ¬ҪУЎЈАэИзЈ¬ФЪөШГж»щХҫіцПЦ№КХПКұЈ¬ҝЙТФҝмЛЩІҝКрОЮИЛ»ъОӘөШГжУГ»§МṩҪфјұНЁРЕЦ§іЦ[1-4]ЎЈЖдҙОЈ¬¶ФУЪ·дОСНшВзЦ§іЦөДОЮИЛ»ъПөНіЈ¬ОЮИЛ»ъҝЙТФНЁ№эУлөШГж»щХҫұЈіЦНЁРЕАҙНкіЙ·ЙРРИООсЎЈҝјВЗөҪОЮИЛ»ъөДёЯ»ъ¶ҜРФәНёЯЛЩ·ЙРРЈ¬ТФј°ОЮИЛ»ъУлөШГжУГ»§Ц®јдҙуБҝөДКэҫЭҙ«Кд»о¶ҜЈ¬ҪЁБўёЯЦКБҝөДҝХөШНЁРЕБ¬ҪУКЗЦБ№ШЦШТӘөД[5]ЎЈ
И»¶шЈ¬УЙУЪОЮИЛ»ъНЁіЈУЙөзіШОӘЖдөз»ъТФј°»ъФШөзЧУЙиұёҪшРР№©өзЈ¬ОЮИЛ»ъөД·ЙРРКұјдКЗПаөұУРПЮөД[6]ЎЈОӘБЛұЈЦӨОЮИЛ»ъУлөШГж»щХҫОИ¶ЁәНіЦРшөДНЁРЕБ¬ҪУЈ¬ТФј°ОЮИЛ»ъ·ЙРРИООсөДҝЙҝҝНкіЙЈ¬ұШРлСРҫҝёЯДЬР§өД·дОСБ¬ҪУОЮИЛ»ъПөНіЎЈұҫОДҝјВЗОЮИЛ»ъФЪИООсЦҙРР№эіМЦР·ЙРРДЬәДөДЧоРЎ»ҜОКМвЈ¬ЖдЦРОЮИЛ»ъҙУЛж»ъөДіхКјО»ЦГ·ЙРРөҪ№М¶ЁөДДҝөДөШТФНкіЙИООсЎЈФЪұЈЦӨ·ЙРР№эіМЦРУл·дОСНшВзұЈіЦҝЙҝҝНЁРЕБ¬ҪУөДЗйҝцПВЈ¬НЁ№эУЕ»ҜОЮИЛ»ъөД·ЙРРВ·ҫ¶АҙЧоРЎ»ҜОЮИЛ»ъөДДЬБҝПыәДЎЈ
ұҫОДМбіцБЛТ»ЦЦ»щУЪОЮПЯөзөШНјЦШ№№өДВ·ҫ¶№ж»®·Ҫ·ЁЈ¬ОЮПЯөзөШНјНЁ№э¶ФРЎіЯ¶ИРЕөАЛҘВдј°ЖдУХөјР§УҰҪшРРЖҪҫщЈ¬ҙУ¶шДЬ№»ГиКцДҝұкЗшУтДЪҝХјдәНЖөВКЙПөДЖөЖЧ»о¶ҜТФј°ҙ«КдРЕөАөДРЕПў[7]ЎЈұҫОДМбіцБЛТ»ЦЦРВөДОЮПЯөзөШНјЦШ№№·Ҫ·ЁЈ¬ОЮИЛ»ъКЧПИ¶ФОЮПЯ»·ҫіҪшРРПЎКиІЙСщЈ¬Ҫш¶ш»щУЪІЙСщөГөҪөДКэҫЭ¶ФОЮПЯөзөШНјҪшРРЦШ№№Ј¬јҙДЬ№АјЖіцДҝұкЗшУтЦРЛщУРО»ЦГөДЦР¶ПёЕВКЈ¬ҙУ¶шҙуҙуҪөөНОЮИЛ»ъөШНјІЙСщөДҝӘПъЎЈҪшТ»ІҪөШЈ¬ұҫОДМбіцБЛТ»ЦЦ»щУЪЙо¶ИЗҝ»ҜС§П°ЈЁDRL,Deep Reinforcement LearningЈ©өДВ·ҫ¶№ж»®Лг·ЁЎЈАыУГЦШ№№өГөҪөДОЮПЯөзөШНјЈ¬ОЮИЛ»ъФЪДҝұкЗшУтДЪ¶аҙО·ЙРРЈ¬ФЪҙЛ№эіМЦРАыУГDRL өГөҪЧоУЕөДВ·ҫ¶№ж»®ІЯВФЈ¬ҙУ¶шМбёЯОЮИЛ»ъИООсЦҙРРөДР§ВКЈ¬јхЙЩОЮИЛ»ъ·ЙРРКұјдәНДЬәДЎЈ
1 Па№ШСРҫҝ№ӨЧч
ОӘБЛҪвҫцОЮИЛ»ъВ·ҫ¶№ж»®ёҙФУ¶ИёЯөДОКМвЈ¬ТСУР»щУЪЙо¶ИЗҝ»ҜС§П°әНОЮПЯөзөШНјөДОЮИЛ»ъВ·ҫ¶№ж»®·Ҫ·ЁСРҫҝЎЈФЪБӘәПУЕ»ҜОЮИЛ»ъөДЧо¶М·ЙРРВ·ҫ¶Ј¬ІўЧоҙу»ҜҙУөШГжЙиұёКХјҜөДКэҫЭБҝОКМвЙПЈ¬ОДПЧ[8]МбіцБЛТ»ЦЦОЮИЛ»ъёЁЦъөДОпБӘНшјЬ№№Ј¬ІўАыУГ»щУЪDRL өДЛг·ЁөГөҪОЮИЛ»ъөДЧоУЕВ·ҫ¶әННМНВБҝЎЈОӘБЛұЬҝӘХП°ӯОпЈ¬ОДПЧ[9]АыУГЙо¶ИИ·¶ЁРФІЯВФМЭ¶ИЈЁDDPG,Deep,Deterministic,Policy GradientЈ©Лг·ЁЈ¬К№ОЮИЛ»ъҝЙТФ¶АБўҪшРРҫцІЯЎЈМбіцБЛБ¬НЁГж»эәННюРІәҜКэөДёЕДоЈ¬ІўҪ«ЖдУҰУГУЪDRL өДҪұАшЦРЎЈФЪ»щУЪDRL өДВ·ҫ¶№ж»®Лг·ЁЙПЈ¬ОДПЧ[10]АыУГУЕПИј¶ҫӯСй»Ш·ЕЈЁPER,Prioritized Experience ReplayЈ©јУЛЩСөБ·№эіМЎЈНЁ№э№ШЧўПөНіөДЧҙМ¬Ј¬ОЮИЛ»ъСЎФсЧојС·ЙРР·ҪПтЈ¬ҙУ¶шЧоҙуПЮ¶ИөШОӘУГ»§Мṩ·юОсЈ¬ОДПЧ[11]НЁ№эЧоҙу»ҜёІёЗУГ»§КэІўЧоРЎ»ҜОЮИЛ»ъДЬәДАҙҪшРРВ·ҫ¶№ж»®ЎЈФЪҝјВЗ¶ајЬОЮИЛ»ъСШІ»Н¬В·ҫ¶ФЪДҝұкҝХУтДЪ·ЙРРІўОӘөШГжУГ»§ЙиұёМṩ·юОсөДіЎҫ°ПВЈ¬ОДПЧ[12]МбіцБЛТ»ЦЦ»щУЪ¶аЦЗДЬМеDRL өДВ·ҫ¶№ж»®Лг·ЁЈ¬¶ФГҝјЬОЮИЛ»ъөДВ·ҫ¶ҪшРР¶АБў№ЬАнЈ¬ДҝұкКЗУЕ»ҜГҝјЬОЮИЛ»ъөДөШАн№«ЖҪРФЎўУГ»§ИЭБҝөД№«ЖҪРФәНУГ»§өДЧЬДЬәДЎЈФЪЧоҙу»ҜөШГжУГ»§ЖҪҫщҙ«КдЛЩВКОӘДҝұкПВЈ¬ОДПЧ[13]МбіцБЛТ»ЦЦ»щУЪ¶аЦЗДЬМеЙо¶ИQ С§П°ЈЁMADQL,Multiagent Deep Reinforcement LearningЈ©өДЛг·ЁЈ¬ҙУ¶шҪвҫцВ·ҫ¶№ж»®әНРЕөА·ЦЕдБӘәПУЕ»ҜОКМвЎЈФЪ»щУЪГЬјҜІҝКрөДОЮИЛ»ъөДТФДЪИЭОӘЦРРДөДОЮПЯҙ«КдНшВзіЎҫ°ЦРЈ¬ОДПЧ[14]НЁ№эІҝКрҙу№жДЈөДОЮИЛ»ъАҙҪ«»әҙжөДДЪИЭҙ«КдөҪЛж»ъ·ЦІјөДөШГжҝН»§¶ЛЈ¬ІўМбіцБЛТ»ЦЦВ·ҫ¶№ж»®әННЁРЕөч¶ИБӘәПУЕ»Ҝ·Ҫ·ЁЈ¬ІЙУГ¶ҜМ¬ЙсҫӯНшВзС§П°ЧоУЕҝШЦЖІЯВФЎЈХл¶Ф¶аОЮИЛ»ъНЁРЕПөНіЈ¬ОДПЧ[15]МбіцБЛТ»ЦЦРВөДВ·ҫ¶№ж»®әНЧКФҙ·ЦЕдБӘәПУЕ»Ҝ·Ҫ·ЁЈ¬ёГ·Ҫ·ЁІЙУГ¶аЦЗДЬМеDRL Лг·ЁҪшРР·ЦІјКҪІҝКрЈ¬І»РиТӘКВПИЦӘөАНшВзөД¶ҜМ¬МШРФЎЈИ»¶шЈ¬ЙПКцОДПЧІўОҙЙжј°өҪАыУГЦШ№№өГөҪөДОЮПЯөзөШНјҪшРРОЮИЛ»ъВ·ҫ¶№ж»®Ј¬ТФј°ФЪUAV-GBS НЁРЕФјКшПВҪшРРОЮИЛ»ъөДДЬР§УЕ»ҜЎЈ
2 ПөНіДЈРН
ПөНіЦР°ьАЁТ»ёцОЮИЛ»ъТФј°¶аёцөШГж·дОС»щХҫЈ¬ОЮИЛ»ъФЪДҝұкҝХУтЦР·ЙРРЈ¬»щХҫФтОӘОЮИЛ»ъМṩͨРЕ·юОсЎЈјЩЙиОЮИЛ»ъөД·ЙРРЗшУтОӘБў·ҪМеЈ¬ұнКҫОӘ [x1,x2]ЎБ[y1,y2]ЎБ[z1,z2]Ј¬ЖдЦР1 әН2 ·ЦұрұнКҫЗшУтөДПВұЯҪзәНЙПұЯҪзЎЈОЮИЛ»ъөДИООсКЗ»щУЪОЮПЯөзөШНјЈ¬ҙУТ»ёцЛж»ъөДіхКјО»ЦГ·ЙРРөҪ№М¶ЁөДЧоЦХО»ЦГЎЈПөНіДЈРНИзНј1 ЛщКҫЈә
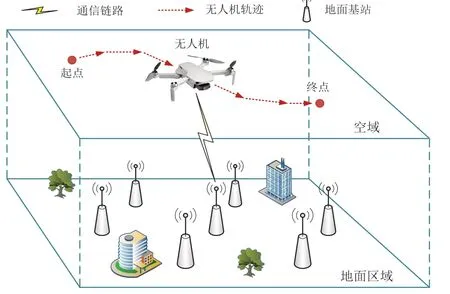
Нј1 ПөНіДЈРН
ОЮИЛ»ъФЪtКұҝМөДО»ЦГұнКҫОӘl(t)Ј¬0 ЎЬtЎЬTЈ¬·ЦұрУГlIәНlFұнКҫОЮИЛ»ъөДіхКјО»ЦГәНЧоЦХО»ЦГЈ¬УЪКЗУРl(0)=lIЈ¬l(t)=lFЎЈјЩЙиДҝұкЗшУтДЪ№ІУРCёц·дОС»щХҫЈ¬УГhc(t),1ЎЬcЎЬCұнКҫtКұҝМҙУ»щХҫcөҪОЮИЛ»ъөДөИР§РЕөАФцТжЈ¬ТтҙЛОЮИЛ»ъФЪtКұҝМҙУ»щХҫcҪУКХөҪөДРЕәЕ№ҰВКұнКҫОӘЈә
ЖдЦРPcұнКҫ»щХҫcөД·ўЙд№ҰВКЈ¬ОӘ№М¶ЁЦөЈ»ҰВc(ЎӨ) әНGc(ЎӨ)·ЦұрұнКҫ»щХҫcөДҙуіЯ¶ИРЕөАФцТжәНМмПЯФцТжЈ»Лж»ъұдБҝ(t)ұнКҫРЎіЯ¶ИЛҘВдЎЈУГcЎд(t) ЎК {1,...,C}ұнКҫФЪtКұҝМУлОЮИЛ»ъБ¬ҪУөД·дОС»щХҫЎЈөұОЮИЛ»ъөДҪУКХРЕёЙұИЈЁSIR,Signal to Interference RatioЈ©РЎУЪгРЦөҰГthЈ¬јҙS IR(t)ЈјҰГthЈ¬ФтЕР¶ПОЮИЛ»ъУл·дОСНшВзөДБ¬ҪУҙҰУЪЦР¶ПЧҙМ¬ЎЈОЮИЛ»ъФЪtКұҝМөДҪУКХРЕёЙұИұнКҫОӘЈә
УЙУЪРЎ№жДЈЛҘВдөДЛж»ъРФЈ¬ФЪtКұҝМКұЈ¬¶ФУЪИОТвОЮИЛ»ъО»ЦГәНУлОЮИЛ»ъ№ШБӘөД·дОСЈ¬ҪУКХРЕёЙұИКЗТ»ёцЛж»ъКэЈ¬ЛщТФЦР¶ПёЕВККЗl(t)әНcЎд(t)өДәҜКэЈ¬ұнКҫОӘЈә
ёщҫЭОЮИЛ»ъөДЦР¶ПёЕВКЈ¬ҝЙТФөГөҪИООсЦҙРР№эіМЦРөДЦР¶ПКұјдОӘЈә
ЙиОЮИЛ»ъөДКұјдіЙұҫОӘИООсНкіЙКұјдәНЦР¶ПКұјдөДјУИЁәНЈ¬јҙЈә
ЖдЦРЈ¬ҰБәНҰВ·ЦұрұнКҫОЮИЛ»ъЧЬИООсНкіЙКұјдәНЧЬИООсНкіЙКұјдДЪөДЦР¶ПКұјдИЁЦШЎЈУЙУЪТӘЗуОЮИЛ»ъФЪ·ЙРР№эіМЦРУл»щХҫұЈіЦБјәГөДНЁРЕЦКБҝЈ¬ЛщТФҪ«ҰВ¶ЁТеОӘТ»ёцКэЦөҪПҙуөДіЈКэЈ¬ҙУ¶шұЈЦӨУл»щХҫОИ¶ЁөДНЁРЕБ¬ҪУЎЈ
ОЮИЛ»ъФЪИООсЦҙРР№эіМЦРөДДЬБҝПыәДНЁіЈ°ьә¬·ЙРРНЖҪшДЬәДәННЁРЕДЬәДЎЈУЙУЪОЮИЛ»ъөДНЁРЕДЬәДұИНЖҪшДЬәДРЎөГ¶аЈ¬ЛщТФұҫОДЦ»ҝјВЗОЮИЛ»ъөДНЖҪшДЬәДЎЈ№М¶ЁТнОЮИЛ»ъөДНЖҪшДЬБҝҝЙТФұнКҫОӘ[16]Јә
ЖдЦРЈ¬c1әНc2КЗУлҝХЖшГЬ¶ИЎўОЮИЛ»ъЦШБҝТФј°»ъТнГж»эөИУР№ШөД№М¶ЁІОКэЈ»v(t)әНa(t)·ЦұрұнКҫОЮИЛ»ъФЪtКұҝМөДЛЩ¶ИәНјУЛЩ¶ИЈ»g=9.8 m/s2ОӘЦШБҰјУЛЩ¶ИЎЈТтҙЛЈ¬ОЮИЛ»ъөД·ЙРРДЬәДИЎҫцУЪЖдЛЩ¶ИәНјУЛЩ¶ИЎЈФЪұҫОДЦРЈ¬јЩЙиОЮИЛ»ъФИЛЩ·ЙРРЈ¬јУЛЩ¶ИОӘ0Ј¬ТтҙЛОЮИЛ»ъөДНЖҪш№ҰВКОӘ[17]Јә
НЖҪшДЬБҝҝЙТФҪшТ»ІҪұнКҫОӘЈә
ФЪОЮПЯөзөШНјЦШ№№№эіМЦРЈ¬ОЮИЛ»ъКЧПИҙУКөјК»·ҫіЦРПЎКиІЙСщЈ¬ІўјЖЛгІЙСщөгЦР¶ПёЕВКЈ¬Чоәу¶ФДҝұкЗшУтОЮПЯөзөШНјҪшРРЦШ№№»ЦёҙЎЈјЩЙиОЮИЛ»ъКЧПИФЪДҝұкҝХУтЛж»ъІЙСщNёцКэҫЭөгЈ¬јЗОӘxi(i=1,2,3Ўӯ,N)ЎЈҪ«ПЎКиІЙСщәуөГөҪөДОЮПЯөзөШНјұнКҫОӘy0Ј¬іЖОӘөИҙэЦШ№№өДНЛ»ҜөДНјПсЎЈЛжәуЈ¬ОЮИЛ»ъ»щУЪy0ЦШ№№ОЮПЯөзөШНјЎЈҪ«ОЮПЯөзөШНјЦШ№№ұнКҫОӘОуІоЧоРЎ»ҜУЕ»ҜОКМвЈ¬ұнКҫОӘЈә
РВҝОіМұкЧјГчИ·ЦёіцЈ¬¶БКЗРЎС§УпОДҪМС§өДЦШТӘИООсЈ¬УРёРЗйөШАК¶БҝООДДЬ№»К№С§ЙъКЬөҪЗйёРөДС¬МХЈ¬ХвТІКЗУпОДС§П°өДЦШЦРЦ®ЦШЎЈҝОМГҪМС§КЗҝӘХ№ҪМС§№ӨЧчөДЦчТӘіЎЛщЈ¬ҪМКҰУҰҪбәПЛР¶БДЪИЭЈ¬ІЙИЎ·бё»өДҪМС§РОКҪЈ¬ЦёөјС§ЙъҪшРРУРёРЗйЛР¶БЈ¬І»¶ПМбЙэС§ЙъөДЛР¶БДЬБҰЎЈ
ЖдЦРe(ЎӨ) ОӘУлЦШ№№УР№ШөДКэҫЭПоЈ¬yұнКҫЦШ№№өДОЮПЯөзөШНјЎЈR(y) КЗТ»ёцХэФт»ҜПоЈ¬УГТФұнКҫЧФИ»НјПсЙПөДТ»°гПИСйЎЈөШНјЦШ№№өДДҝұкКЗХТөҪОКМвЈЁ9Ј©өДЧоУЕҪвy*ЎЈФЪұҫОДЦРЈ¬УГЙсҫӯНшВзТюә¬өДПИСйРЕПўҙъМжХэФт»ҜәҜКэЈ¬УГЙсҫӯНшВзfҰИ(ЎӨ) УіЙдҙъМжҙэЦШ№№өДөШНјyЈ¬јҙЈә
УЕ»ҜұдБҝҰИ*ҝЙТФНЁ№эІОКэЛж»ъіхКј»ҜөДЛж»ъМЭ¶ИПВҪөАҙЗуөГЎЈЖдЦРЈ¬zКЗТ»ёц№М¶ЁөД°ьә¬32 ёцМШХчНјөДИэО¬ХЕБҝЈ¬ЖдҝХјдҙуРЎУлyПаН¬Ј»НшВзөДКдИлКЗЛж»ъіхКј»ҜөДzЈ»ҰИКЗНшВзІОКэЈ¬НЁ№эСөБ·өГөҪЧоУЕЦөЎЈөГөҪЧоУЕІОКэҰИәуЈ¬КдИлzөГөҪЧоУЕөДyЈ¬И»әуөГөҪЦШ№№өДОЮПЯөзөШНјЎЈ
ОӘБЛЗуөГЧоУЕөДОЮИЛ»ъ·ЙРРВ·ҫ¶Ј¬ОЮИЛ»ъФЪВъЧгБјәГөДUAV-GBS Б¬ҪУЦКБҝөДФјКшЗ°МбПВЈ¬ЧоРЎ»ҜИООсЦҙРР№эіМЦРөД·ЙРРДЬәДЈ¬УЪКЗУЕ»ҜОКМвҝЙТФұнКҫОӘЈә
УЙУЪУЕ»ҜОКМвөД·ЗН№РФәНҪПҙуөДЛСЛчҝХјдЈ¬ҙ«НіөДУЕ»Ҝ·Ҫ·ЁәЬДСөГөҪЧоУЕҪвЎЈОӘБЛЗуҪвёГОКМвЈ¬ФЪПВТ»ҪЪЦРМбіцБЛТ»ЦЦ»щУЪөШНјЦШ№№өДЙо¶ИЗҝ»ҜС§П°В·ҫ¶№ж»®·Ҫ·ЁЎЈ
3 »щУЪөШНјЦШ№№өДЙо¶ИЗҝ»ҜС§П°В·ҫ¶№ж»®·Ҫ·Ё
ФЪұҫҪЪЦРЈ¬КЧПИМбіцБЛ»щУЪЙо¶ИНјПсПИСйЈЁDIP,Deep Image PriorЈ©өДөШНјЦШ№№Лг·ЁЎЈЛжәу»щУЪЦШ№№өШНјАыУГD3QN Лг·ЁҪшРРВ·ҫ¶№ж»®ЎЈОЮИЛ»ъНЁ№эіўКФІ»Н¬өД¶ҜЧчЈЁactionЈ©Ј¬ҙУ·ҙАЎЈЁrewardЈ©ЦРС§П°Ј¬И»әујУЗҝ¶ҜЧчЈ¬ЦұөҪ¶ҜЧчІъЙъЧојСөД·ҙАЎЎЈұҫОДЛщМбіцөД»щУЪөШНјЦШ№№өДЙо¶ИЗҝ»ҜС§П°В·ҫ¶№ж»®·Ҫ·ЁБчіМИзНј2 ЛщКҫЎЈ

Нј2 DIPRMR-D3QNВ·ҫ¶№ж»®·Ҫ·ЁБчіМНј
3.1 »щУЪЙо¶ИНјПсПИСйөДөШНјЦШ№№Лг·Ё
ҫн»эЙсҫӯНшВзФЪНјПсЦШ№№·ҪГжҫЯУРҪПәГөДРФДЬЈ¬ЛьНЁ№эҙУҙуБҝөДСөБ·СщұҫЦРҪшРРС§П°АҙұЖҪьФӯНјПсЎЈИ»¶шЈ¬ЙъіЙЖчНшВзФЪОҙҫӯС§П°өДЗйҝцПВТІДЬ°ьә¬ҙуБҝөДөНј¶НјПсРЕПўЈ¬јҙЙъіЙЖчНшВзҫЯУРПИСйМШРФЈ¬І»РиТӘСөБ·јҜәНОҙЛр»өөДФӯКјНјПсІўСөБ·Ј¬Ц»РиТӘНЁ№эТ»ХЕҙэЦШ№№өДНЛ»ҜНјПсЧчОӘКдИлЈ¬ұгҝЙТФ¶ФЖдҪшРР»ЦёҙЎЈФЪҙЛ»щҙЎЙПЈ¬ұҫОДМбіцБЛТ»ЦЦ»щУЪЙо¶ИНјПсПИСйөДОЮПЯөзөШНјЦШ№№ЈЁDIPRMRЈ¬Deep Image Prior based Radio Map ReconstructionЈ©Лг·ЁЎЈҙэЦШ№№өДОЮПЯөзөШНј¶ЁТеОӘRЎКCmЎБnЈ¬јҙЈә
ФЪDIPRMR Лг·ЁЦРЈ¬өН·ЦұжөДКдИлНјПсОӘОЮИЛ»ъІЙСщөГөҪөДПЎКиОЮПЯөзөШНјЎЈҪ«ІЙСщұ¶ВКЈЁРиЦШ№№өДөШНјөДіӨәНҝнЙППсЛШөгКэБҝјхЙЩөДұ¶КэЈ©¶ЁТеОӘsЈ¬УЪКЗІЙСщөГөҪөДөШНјұнКҫОӘy0ЎКR(m/s)ЎБ(n/s)ЎЈҪ«ЦШ№№ұ¶ВКЈЁЦШ№№әуөДөШНјПсЛШөгКэБҝУлЦШ№№З°өДұИЦөЈ©¶ЁТеОӘuЈ¬ФтЦШ№№өГөҪөДөШНјyұнКҫОӘyЎКRu(m/s)ЎБu(n/s)ЎЈТтҙЛЈ¬ЦШ№№ИООсЦРөДКэҫЭПоОӘЈә
ЖдЦРd(ЎӨ) :yЎК RuЎБ(m/s)ЎБuЎБ(n/s)Ўъy0ЎКR(m/s)ЎБ(n/s)Ҫ« НјПсҙуРЎ өчХыОӘ(m/s) ЎБ(n/s)ЎЈЧоәуЈ¬НЁ№эөьҙъЗуҪвХТөҪЦШ№№әуУлөН·ЦұжНјПсy0ПаЛЖөДёЯ·ЦұжНјПсyЈ¬јҙЈә
Лг·ЁҫЯМеІҪЦиИзЛг·Ё1 ЛщКҫЎЈ
Лг·Ё1 »щУЪЙо¶ИНјПсПИСйөДөШНјЦШ№№Лг·ЁЈЁDIPRMRЈ©
3.2 »щУЪD3QNөДОЮИЛ»ъВ·ҫ¶№ж»®·Ҫ·Ё
ФЪұҫОДЛщҝјВЗіЎҫ°ЦРЈ¬ОЮИЛ»ъөДВ·ҫ¶№ж»®ОКМвҝЙТФұнКҫОӘТ»ёцВн¶ыҝЙ·тҫцІЯ№эіМЈЁMDP,Markov Decision ProcessЈ©ЎЈУГТ»ёцЛДФӘЧйұдБҝұнКҫMDPЈәЧҙМ¬SЈ¬¶ҜЧчAЈ¬ЧҙМ¬ЧӘТЖёЕВКPәН·ҙАЎRЎЈЖдЦРЈ¬ЧҙМ¬ҝХјд°ьә¬БЛОЮИЛ»ъФЪёш¶Ё·ЙРРЗшУтДЪөДЛщУРҝЙДЬөДО»ЦГЈ»¶ҜЧчҝХјдA°ьә¬ОЮИЛ»ъөД·ЙРР·ҪПтЈ»ЧҙМ¬ЧӘТЖёЕВКPёщҫЭөұЗ°ЧҙМ¬әНәуРш·ЙРР·ҪПтИ·¶ЁЈ»·ҙАЎәҜКэR¶ЁТеОӘЈ¬ЖдЦРҰМКЗОЮИЛ»ъФЪНЈ»ъКұІъЙъөДіН·ЈЈ¬ЙиЦГОӘТ»ёцҪПҙуөДіЈКэЎЈЛг·ЁҫЯМеІҪЦиИзЛг·Ё2 ЛщКҫЎЈ
Лг·Ё2 »щУЪD3QN өДОЮИЛ»ъФЪПЯВ·ҫ¶№ж»®·Ҫ·ЁЈЁDIPRMR-D3QNЈ©
І»Н¬УЪҙ«Ні·Ҫ·ЁЈ¬Лг·Ё2 ЦРОЮИЛ»ъІ»РиТӘЦұҪУУл»·ҫіҪ»»ҘЈ¬¶шКЗФЪОЮИЛ»ъЦҙРРИООсЗ°ҫНЦШҪЁТ»ёцУлКөјК»·ҫіёЯ¶ИОЗәПөДОЮПЯөзөШНјЎЈФЪЗҝ»ҜС§П°ЦРЈ¬ЦЗДЬМеЦұҪУҙУОЮПЯөзөШНјЦРМбИЎКэҫЭЈ¬»сөГҫӯСйЦР¶ПёЕВКЈ¬ҙУ¶ш»сөГ·ҙАЎЦөЈ¬АыУГСөБ·КэҫЭөчХыОЮИЛ»ъөД·ЙРРВ·ҫ¶ЎЈ
УЙУЪёГОКМвЦРөДЧҙМ¬ҝХјдәН¶ҜЧчҝХјдКЗБ¬РшөДЈ¬ұҫОДФЪұЈіЦЧҙМ¬ҝХјдБ¬РшөДН¬КұЈ¬Ҫ«¶ҜЧчҝХјдAАлЙўОӘЛДёц·ЙРР·ҪПтЈ¬јҙЎЈ¶ҜЧчҝХјдөДАлЙў»ҜК№өГ¶ҜЧчЦөәҜКэөДЧҙМ¬КдИлКЗБ¬РшөДЈ¬¶ҜЧчКдіцКЗАлЙўөДЎЈұҫОДІЙУГDueling Double DQNЈЁD3QNЈ©НшВзјЬ№№ЎЈФЪГҝТ»јҜөДГҝТ»ІҪЦРЈ¬Ҫ«ОЮИЛ»ъөДЧҙМ¬Ј¬јҙОЮИЛ»ъөДөұЗ°О»ЦГЙиЦГОӘЙсҫӯНшВзөДКдИлЈ¬КдіцОӘОЮИЛ»ъөД·ЙРР·ҪПтЎЈЧоЦХ»щУЪСөБ·өГөҪөДЙсҫӯНшВзЈ¬ОЮИЛ»ъДЬ№»ёщҫЭОЮПЯөзөШНјЈ¬ФЪИОТвО»ЦГСЎФсіцЧојС·ЙРР·ҪПтЈ¬ҙУ¶шНкіЙВ·ҫ¶№ж»®ЎЈ
4 ·ВХжҪб№ыУл·ЦОц
ФЪұҫҪЪЦРЈ¬¶ФЛщМбіцөДЛг·ЁҪшРР·ВХжКөСйЎЈҝјВЗТ»ёц2 kmЎБ2 km °ьә¬ёЯІгҪЁЦюөДЗшУтЎЈјЩЙиФЪёГЗшУтДЪІҝКрБЛ2 ёцGBSЈ¬ЖдМмПЯёЯ¶ИЙиОӘ25 mЎЈОӘБЛјЖЛгОЮИЛ»ъҙУГҝёц»щХҫҪУКХөҪөДРЕәЕЗҝ¶ИЈ¬КЧПИёщҫЭҪЁЦюХЪөІЗйҝцЕР¶ПОЮИЛ»ъУлГҝёцBS Ц®јдКЗ·сҙжФЪLoS БҙВ·Ј¬И»әујЖЛгUAV-GBS өДВ·ҫ¶ЛрәДЎЈОӘБЛЧјИ·ДЈДвёш¶Ё»·ҫіПВөДUAV-GBS РЕөАЈ¬»щУЪ№ъјКөзРЕБӘГЛЈЁITUЈ©МбіцөДНіјЖДЈРНАҙЙъіЙҪЁЦюОпөДО»ЦГәНёЯ¶ИЎЈјЩЙиҪЁЦюОпёІёЗөДНБөШГж»эХјЧЬНБөШГж»эөДұИАэҰБbd=0.3Ј»өҘО»Гж»эҪЁЦюөДЖҪҫщКэҰВbd=300Ј»ҪЁЦюёЯ¶И·ЦІјөДІОБҝҰГbd=50 mЈ¬ЗТҪЁЦюёЯ¶ИІ»і¬№э90 mЎЈҪ«Ул»щХҫөДБ¬НЁРФИЁЦШЙиЦГОӘТ»ёцҪПҙуөДЦөЈ¬ТФұЈЦӨОЮИЛ»ъУлөШГжБјәГөДНЁРЕБ¬ҪУЎЈЧоәуЈ¬јЩЙиёГЗшУтөДГҝёцО¬¶ИЙПУР201 ёцКэҫЭөгЈ¬јҙm=n=201ЎЈТтҙЛКэҫЭөгЧЬКэОӘ201ЎБ201ЎЈ
Нј3 ұИҪПБЛІЙСщұ¶ВК·ЦұрОӘs=2,4,8,16 Кұ»щУЪDIPRMR ЦШ№№өГөҪөДөШНјЈЁ·ЦұрУГDIP2ЎўDIP4ЎўDIP8 әНDIP16 ұнКҫЈ©әНs=4 Кұ»щУЪЗтГжұдТмәҜКэДЈРНөДKriging Лг·ЁЦШ№№өГөҪөДөШНјЈЁУГSPH4 ұнКҫЈ©өД·еЦөРЕФлұИЈЁPSNR,Peak Signal to Noise RatioЈ©ЎЈҪб№ыұнГчPSNR ЛжЧЕІЙСщұ¶ВКөДФцјУ¶шҪөөНЎЈІЙСщұ¶ВКПаН¬КұЈ¬DIPRMR Лг·ЁЦШ№№өДОЮПЯөзөШНјөДPSNR ГчПФёЯУЪKriging Лг·ЁЎЈТтҙЛЈ¬УлKriging Лг·ЁПаұИЈ¬ұҫОДЛщМб·Ҫ·ЁДЬ№»ҙпөҪёьәГөДөШНјЦШ№№Р§№ыЈ¬ЗТІЙСщөгФҪ¶аЈ¬ЦШ№№Р§№ыФҪәГЎЈ

Нј3 І»Н¬ІЙСщұ¶ВКПВЦШ№№өШНјөД·еЦөРЕФлұИ
Нј4 ұИҪПБЛІ»Н¬ІЙСщұ¶ВКПВЈ¬»щУЪІ»Н¬ЦШ№№·Ҫ·ЁөГөҪөДөШНј·ЙРРөДЖҪҫщЦР¶ПёЕВКУлКөјКЖҪҫщЦР¶ПёЕВКөД№йТ»»Ҝҫщ·ҪОуІоЈЁNMSEЈ©ЎЈҪб№ыұнГчNMSE ЛжЧЕІЙСщұ¶ВКөДФцјУ¶шФцјУЎЈІўЗТЈ¬ФЪПаН¬ІЙСщұ¶ВКПВЈ¬ЛщМбіцөДDIPRMR ЦШ№№Лг·ЁөДNMSE ЧоРЎЎЈТтҙЛЈ¬ұҫОДЛщМб·Ҫ·ЁҪП¶ФұИЛг·Ё¶шСФЈ¬ДЬ№»ёьјУЧјИ·өШ»№ФӯКөјК»·ҫіЦРөДЦР¶ПёЕВК·ЦІјЗйҝцЈ¬ІўЗТІЙСщөгФҪ¶аЈ¬ЦШ№№өГөҪөДөШНјУлФӯөШНјөДОуІоФҪРЎЎЈ

Нј4 І»Н¬ІЙСщұ¶ВКПВёчЦШ№№·Ҫ·ЁЖҪҫщЦР¶ПёЕВКУлКөјКЦөөДNMSE
Нј5 ұИҪПБЛІ»Н¬ІЙСщұ¶ВКәНЦШ№№·Ҫ·ЁПВОЮИЛ»ъөҪҙпДҝөДөШөДГҝМхВ·ҫ¶өДЧЬЦР¶ПКұјдЈ¬өҘО»ОӘГлЈЁsЈ©ЎЈҪб№ыұнГчЈ¬ФЪұҫОДЛщМб·Ҫ·ЁПВОЮИЛ»ъіЙ№ҰөҪҙпДҝөДөШөДЦР¶ПКұјдУлЦШ№№өДОЮПЯөзөШНјГЬЗРПа№ШЈ¬ЦР¶ПКұјдЛжЧЕІЙСщұ¶ВКөДФцјУ¶шФцјУЎЈФЪІЙСщұ¶ВКПаН¬КұЈ¬»щУЪDIPRMRЛг·ЁЦШ№№өДОЮПЯөзөШНјСөБ·өДОЮИЛ»ъ№мјЈөДЦР¶ПКұјдұИKriging Лг·Ё¶МЎЈТтҙЛЈ¬УЙұҫОДЛщМб·Ҫ·ЁЦШ№№өГөҪөДОЮПЯөзөШНјДЬ№»ёьјУЧјИ·өШ·ҙУіХжКөөДОЮПЯ»·ҫіЈ¬ҙУ¶шК№өГОЮИЛ»ъФЪ·ЙРРЦРДЬ№»Ул»щХҫұЈіЦёьәГөДНЁРЕБ¬ҪУЎЈ
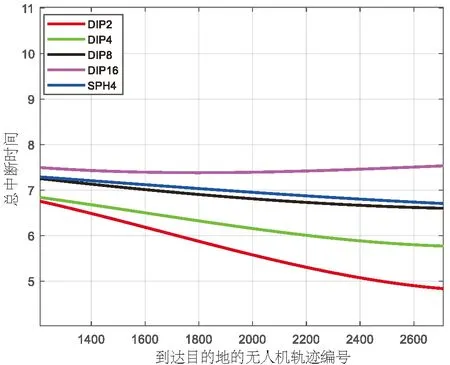
Нј5 І»Н¬ІЙСщұ¶ВКПВОЮИЛ»ъөҪҙпДҝөДөШөДЧЬЦР¶ПКұјд
Нј6 ОӘНЁ№эD3QN Лг·ЁөГөҪөДОЮИЛ»ъВ·ҫ¶ЎЈЖдЦР¶ФұИБЛОЮИЛ»ъФЪ»щУЪОЮПЯөзөШНјЗйҝцПВөД·ЙРРВ·ҫ¶ЈЁНј6ЈЁaЈ©Ј©әНФЪКөјК»·ҫіЦұҪУ·ЙРРөД·ЙРРВ·ҫ¶ЈЁНј6ЈЁbЈ©Ј©ЎЈҪб№ыұнГчЈ¬БҪЦЦСөБ·ЗйҝцПВөДВ·ҫ¶ЗчКЖКЗТ»ЦВөДЎЈФЪСЎФсВ·ҫ¶КұЈ¬ОЮИЛ»ъНщНщ»бҫӯУЙНЁРЕёІёЗВКҙуөДЗшУтөҪҙпДҝөДөШЈ¬ІўЗТјёәхІ»АЛ·СІҪКэЎЈТтҙЛЈ¬ұҫОДЛщМбөШНјЦШ№№·Ҫ·ЁДЬ№»К№өГОЮИЛ»ъС§өГҪУҪьЧоУЕөДВ·ҫ¶Ј¬ІўұЈіЦУл·дОС»щХҫөДБјәГБ¬ҪУЈ¬ҪөөН·ЙРРДЬәДЎЈ
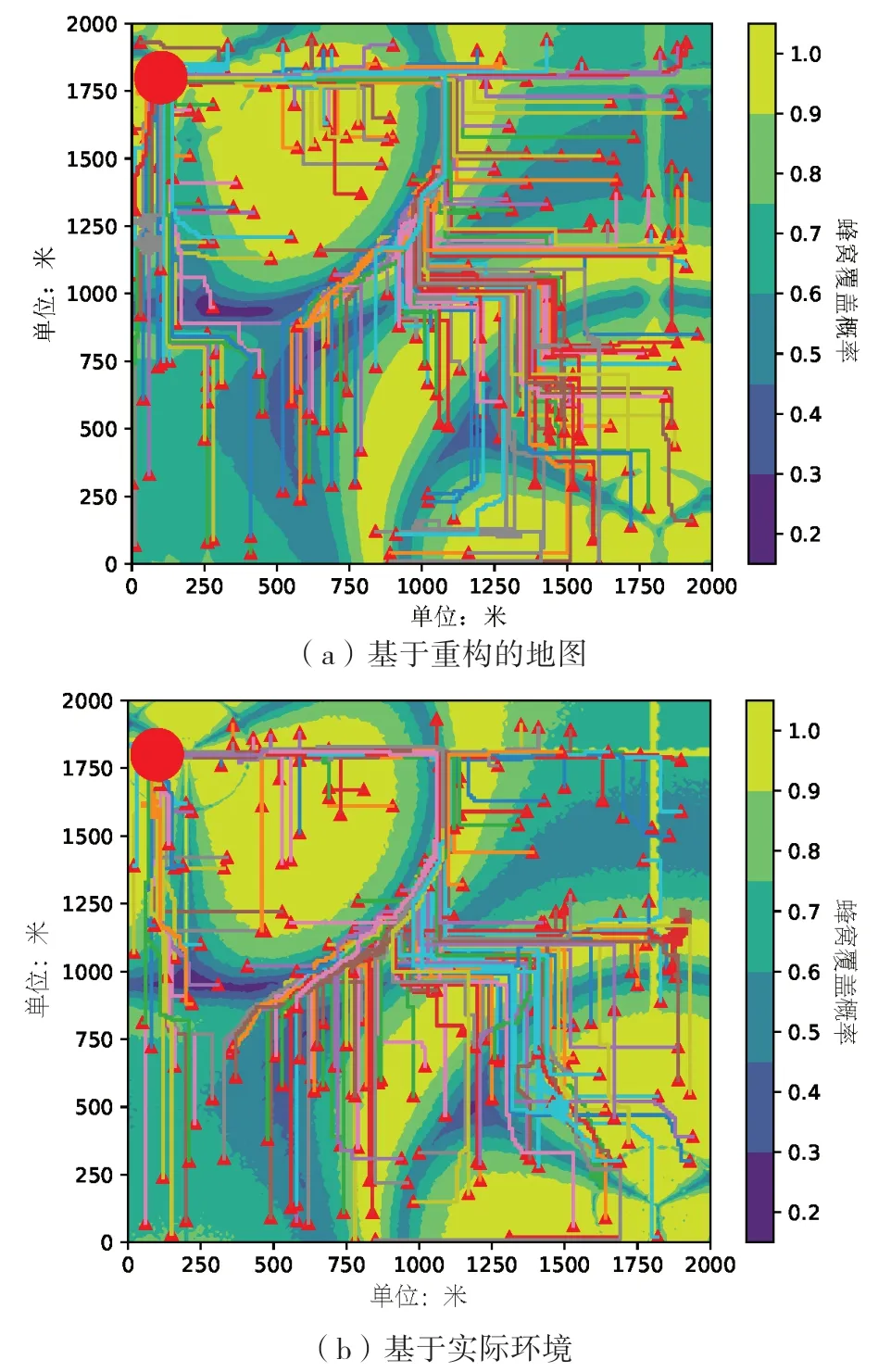
Нј6 D3QNЛг·ЁПВОЮИЛ»ъ»щУЪЦШ№№өШНјөД·ЙРРВ·ҫ¶УлЦұҪУ·ЙРРВ·ҫ¶ұИҪП
5 ҪбКшУп
ұҫОДСРҫҝБЛОЮПЯөзөШНјЦШ№№ТФј°»щУЪЦШ№№өДөШНјҪшРРОЮИЛ»ъВ·ҫ¶№ж»®өДОКМвЎЈҝјВЗөҪОЮИЛ»ъФЪИООсЦҙРР№эіМЦРёҙФУөДіЗКРНЁРЕ»·ҫіЈ¬ОЮИЛ»ъНЁ№эЛщМбөДDIPRMRЛг·ЁЦШ№№ОЮПЯөзөШНјЈ¬Ҫш¶ш»щУЪD3QN Лг·ЁС§П°ЧоУЕВ·ҫ¶№ж»®ІЯВФЈ¬ҙУ¶шФЪұЈЦӨИООсЖЪјдУлПа№Ш»щХҫҝЙҝҝБ¬ҪУөДЗйҝцПВЈ¬ЧоРЎ»ҜЧЬ·ЙРРДЬәДЎЈОӘБЛҝЛ·юҙ«НіөД»щУЪУЕ»ҜөДВ·ҫ¶№ж»®·Ҫ·ЁөДҫЦПЮРФЈ¬ұҫОДМбіцБЛ»щУЪDRL өДВ·ҫ¶№ж»®Лг·ЁЈ¬ёГЛг·ЁЦ»РиТӘОЮИЛ»ъөДРЕәЕІвБҝЧчОӘКдИлЎЈ·ВХжҪб№ыұнГчЈ¬ОЮИЛ»ъҝЙТФ»щУЪЦШ№№өДОЮПЯөзөШНјҪшРРВ·ҫ¶№ж»®Ј¬ҙУ¶шМбёЯБЛОЮИЛ»ъөД№ӨЧчР§ВКІўҪөөНЦҙРРИООсөДёҙФУ¶ИЎЈұҫОДМбіцөД»щУЪDIP өДөШНјЦШ№№Лг·ЁДЬ№»УРР§»№ФӯКөјК»·ҫіөДЦР¶ПёЕВКЗйҝцЎЈІўЗТЈ¬»щУЪDIPRMRD3QN Лг·ЁЈ¬ОЮИЛ»ъДЬ№»ҪөөН·ЙРРДЬәДЈ¬ІўЗТұЈіЦУлөШГж»щХҫөДҝЙҝҝНЁРЕБ¬ҪУЎЈ